
主動安全系統(tǒng)AEB(Autonomous-Emergency-Braking)目前在車輛上的搭載率日益提升,主動剎車逐步成為日常駕駛過程中不可或缺的功能。當車輛識別到前方障礙物時,該系統(tǒng)會避免碰撞或者降低碰撞速度減輕傷害。該系統(tǒng)作用過程中,車內(nèi)乘員的姿態(tài)受制動減速度、車速、駕駛員意識行為等多重因素影響。為探究AEB介入碰撞場景情況下車內(nèi)乘員的行為姿態(tài),工程院安全開發(fā)部開展了上百次真實人體道路試驗,同時為開發(fā)符合實際情況的主動式人體有限元模型進行了深入研究。

圖1 AEB介入下乘員離位姿態(tài)示意圖
道路實驗中,使用制動機器人模擬AEB制動減速度的輸入,多傳感器集成設(shè)備結(jié)合攝像頭采集不同體征的志愿者離位響應(yīng)以及肌電信號。對輸出數(shù)據(jù)進行數(shù)學(xué)統(tǒng)計分析,研究了離位位移隨影響因素變化的規(guī)律性以及個體化差異所帶來的離散型變化。通過對各個部位的肌肉激活程度的參數(shù)標定和對比,發(fā)現(xiàn)下肢、中斜方肌、指伸肌在駕駛員無意識狀態(tài)下激活特征更明顯。這些實驗數(shù)據(jù)和分析統(tǒng)計結(jié)果幫助我們深入理解主被動安全技術(shù)下乘員離位的真實情況,并為開發(fā)主動式人體有限元模型奠定基礎(chǔ)。
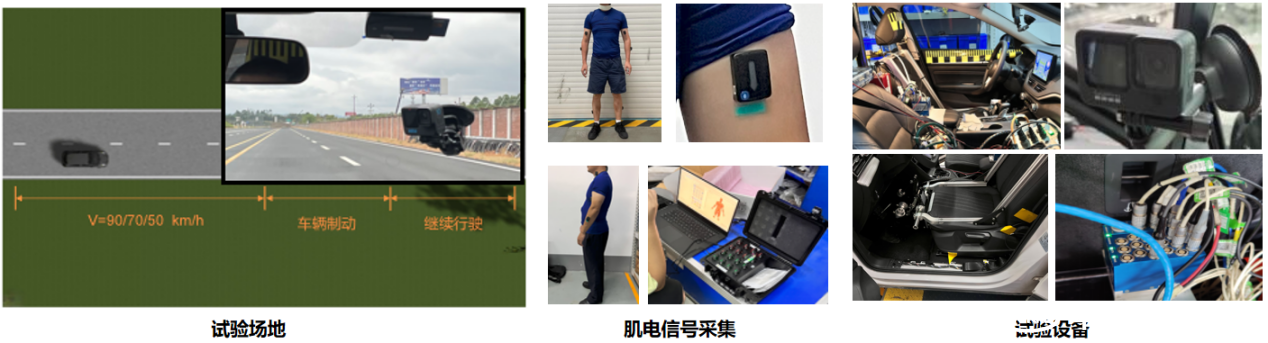
圖2 實驗場地及設(shè)備
主動式人體有限元模型采用了被動有限元模型與主動控制模型耦合的方法,解決實際情況中骨骼肌等效問題。通過CT掃描獲得層厚0.625mm人體圖像,結(jié)合有限元方法構(gòu)建高度仿生的人體肌肉被動有限元模型,通過輸入實際采集的肌肉激活曲線結(jié)合PID控制策略,模擬肌肉收縮搭建主動控制模型,最后對耦合模型適用性進行對標驗證,模型的頭部、肩部、頸部的離位姿態(tài)均與實驗數(shù)據(jù)高度吻合。
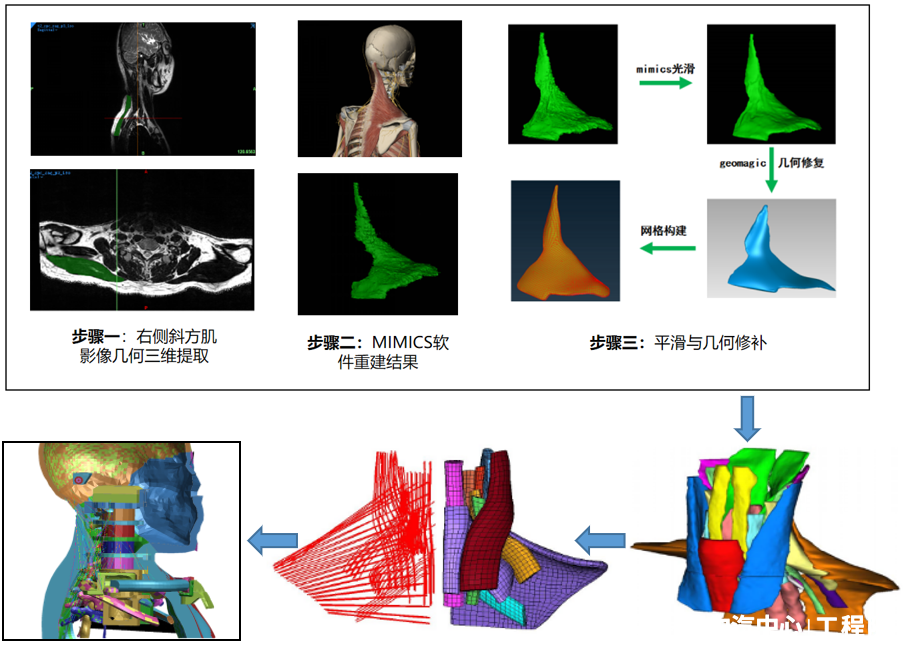
圖3 主動式人體模型開發(fā)流程
目前工程院安全開發(fā)部成功構(gòu)建了具有真實場景、樣本豐富、多因素變量特征的預(yù)碰撞信息數(shù)據(jù)庫,為主被動融合虛擬測評標定提供堅實可靠的數(shù)據(jù)來源。主動式人體模型的相關(guān)衍生技術(shù)已得到專利保護,目前團隊具有成熟的開發(fā)主動式人體模型的能力,可以利用該技術(shù)開發(fā)不同體征、性別、年齡的主動式人體模型,同時具備開發(fā)不同部位的主動式子模型的技術(shù)能力。該技術(shù)的優(yōu)勢在于模型能夠模擬真實的人體反應(yīng),從而更準確地評估車輛在不同碰撞場景下的安全性能,提供更加精準全面的車輛安全性能開發(fā)方案。
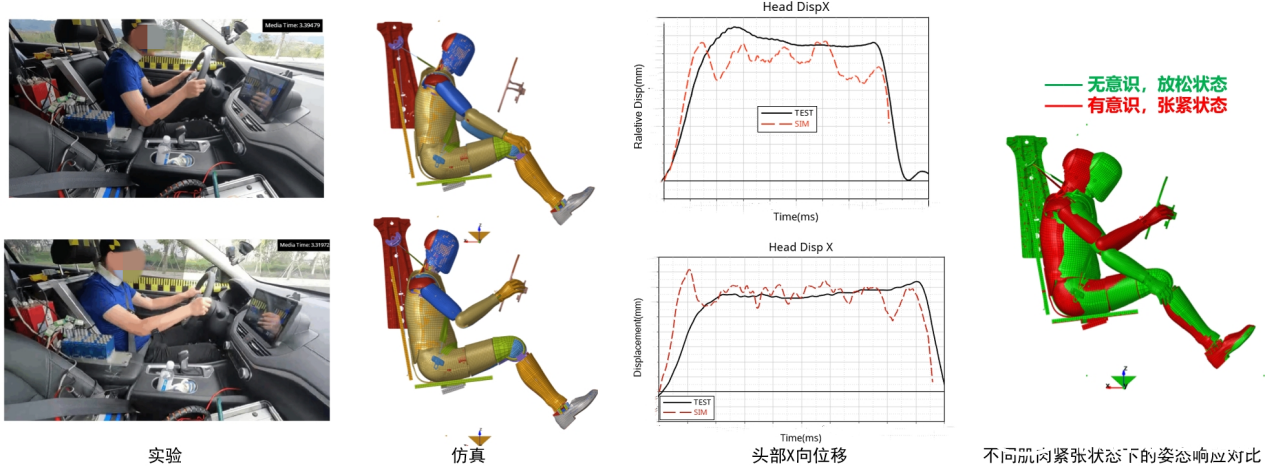
圖4 主動式人體模型對標分析
主動式人體模型作為一種先進的開發(fā)工具,在汽車安全開發(fā)、航空安全研究、其他交通工具安全評估等多領(lǐng)域具有廣泛的應(yīng)用場景,在推動交通安全技術(shù)的革新上發(fā)揮著舉足輕重的作用。隨著科技的發(fā)展及新一輪的技術(shù)升級,主被動融合技術(shù)將在未來交通參與者事故場景中發(fā)揮更大的作用,為交通安全性能的提升提供強有力支持。
商務(wù)聯(lián)絡(luò):高明武 18632283172 gaomingwu@catarc.ac.cn